Mail Us :

Call Us : +91 22 2885 0341
Mail Us :
Call Us : +91 22 2885 0341

Industrial cutting applications are typically programmed using one of two methods:
Today's robots, with improved accuracy and calibration methods, permit exceptional off-line programming of cutting paths. Six-axis robots provide the flexibility and precision required for cutting applications. To date, this might have been considered a niche market when compared to 2D sheet cutters, however robots provide unique capabilities for part recognition through vision, six degrees of freedom for bevel control, and for part load and unload. Direct or point-to-point teaching is an effective programming method when fine tuning or adjustments are required.
6-Axis Robot
Software control for height, start, and locating
Multiple Table
No wait time for load and unload
No changeover
Flat Bed Cutter
Additional hardware for height, start, and locating
Single Table
Wait time for load and unload
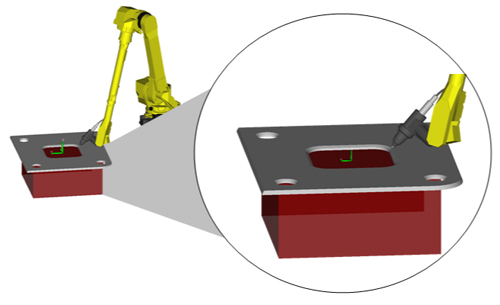
The robot detects surface parallelism and adjusts pierce height based on the calculated plane. This allows for consistent stand off and pierce control with improved process quality.
Robot Software - Pierce Control
This feature is integrated through robot motion planning. It includes a simple interface to plasma voltage which is user-settable and dynamic. Software-based control is easy to use with no additional mechanisms. Part variances such as wavy plates or bent material are handled as part of the solution as well as mill tolerances, controlled dross, and edge quality.
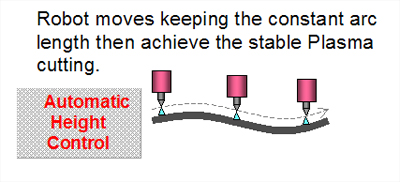
AVC Height Control
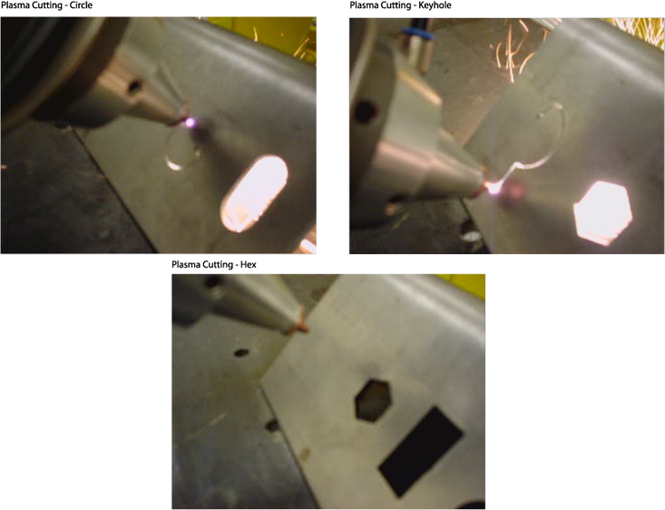
Plate cutting can be performed to cut precise predefined holes such as a circle, keyhole, or hexagon.
Historically, plate cutting has been done on a traditional X-Y table NC type machine. Recently, robot companies have worked with PC nesting software providers to develop a post-processor that generates robotic teach pendant programs instead of NC programs. This is a cost effective measure due in part to increasing steel costs reported by the Financial Times (1). Since a robot is more cost effective and flexible for thick plate cutting, bevel control, remnant usage and unloading, companies are looking to robots to assist in production solutions.
Robots using efficient nesting software minimize waste and keep costs down. They are advantageous since they articulate orientation and rotation easily. Material cut on an angle deflects expulsions away from the finished product improving product quality. Optional robot software, developed for precise orientation control, is a key advantage in this process. In this case the robot searches for and locates the start position and provides precise orientation control maximizing travel speed and improving cut quality.
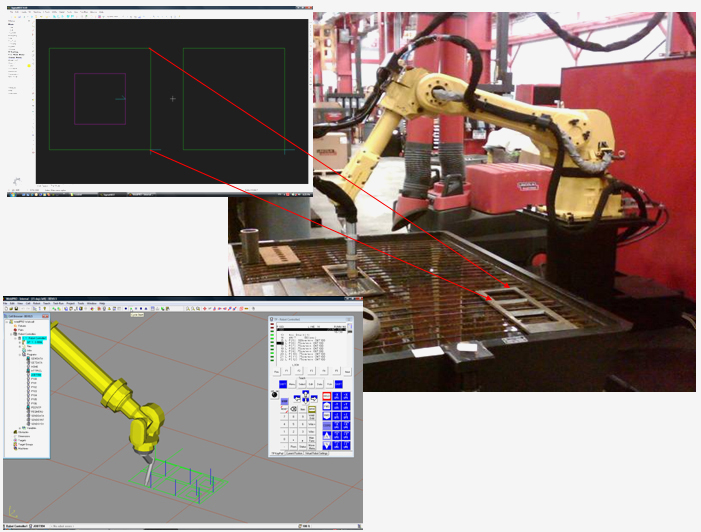
Off-line program creation offers maximum cell up-time. For this to be effective, mathematical cell models must be similar to the actual cell. However, no teach pendant operation is needed. Just be sure to use good setup principals during robot system definition. Off-line programming allows you to perform robot and workcell layout using robot TCP (Cutting Torch), Tooling fixtures, and Plasma or laser Power supply. The same principals apply to cell cloning and part program transfer. The post processor (PC) must have 'the basic robot cell' configuration of the tool center point (TCP), motion range, installation, etc., and use process tables for cutting, and system configuration for sensing.
Robot cutting path and parts are automatically nested within the steel plate.
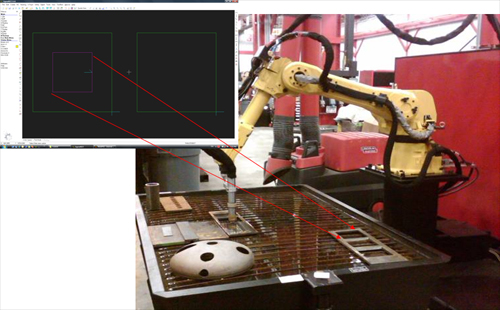
Robotic Nesting Application
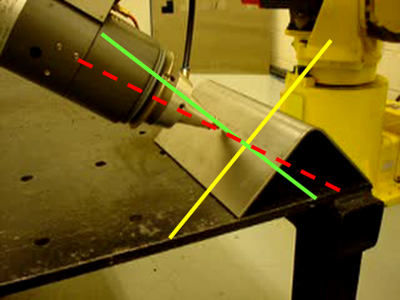
Straight or contour bevel cutting, typically performed using a guide to cut on an edge instead of straight up and down, has improved dramatically with robotics. Whether you are performing laser, plasma, oxy-fuel, or water-jet cutting, the bevel is obtained using highly accurate, height sensing robotics.
Bevel Application







